Rd-03是安信可科技开发的雷达模组,搭载矽典微的S3KM1110芯片S3KM1110 是一种基于FMCW雷达收发器技术的集成单片机毫米波传感器SoC它工作在24GHz的K 波段,每个单频扫描的调制带宽高达1GHz。
利用FMCW调频连续波,对设定空间内的目标进行探测结合雷达信号处理,实现高灵敏度的运动检测和微动检测 Rd-03 模组可感知区域内是否有运动或者微动的人体,实现实时检测结果提供可视化的配置工具,可轻松配置感应距离范围、不同区间的感应灵敏度和无人延时时间等。
为了方便大家直接上手 Rd-03,今天带来这篇上位机配置教程,0 基础入门,0 难度配置,看完这篇有手就会。01软硬件准备硬件准备
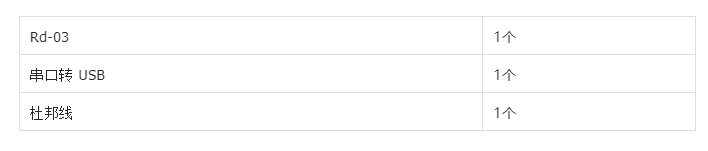
外观展示——Rd-03软件准备Rd-03 可视化配置工具(上位机)Rd-03 模组说明书:https://docs.ai-thinker.com/_media/rd-03_v1.0.0%E6%A8%A1%E7%BB%84%E8%AF%B4%E6%98%8E%E4%B9%A6.pdf
其它资料:https://docs.ai-thinker.com/rd-0302雷达安装与上位机配置雷达安装雷达具有两种安装方式,挂壁和挂顶安装。这里附上安装示意图。
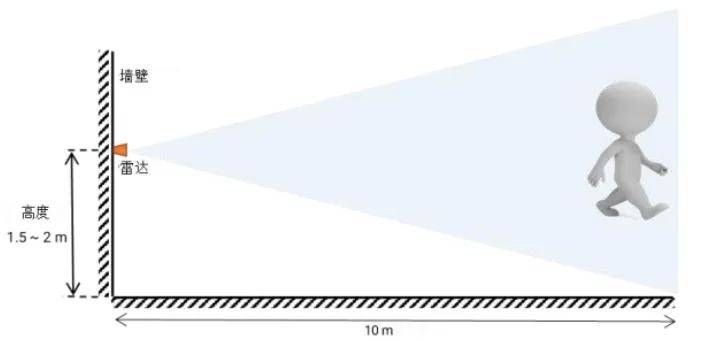
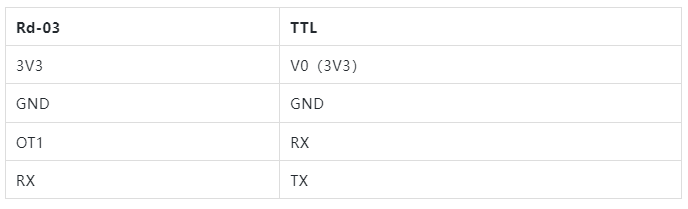
安装最主要的是雷达一定要固定,自身不能有晃动,以及屏蔽一些金属的干扰。雷达配置首先当然是用 TTL 工具连接我们的 Rd-03,接线方式如下:
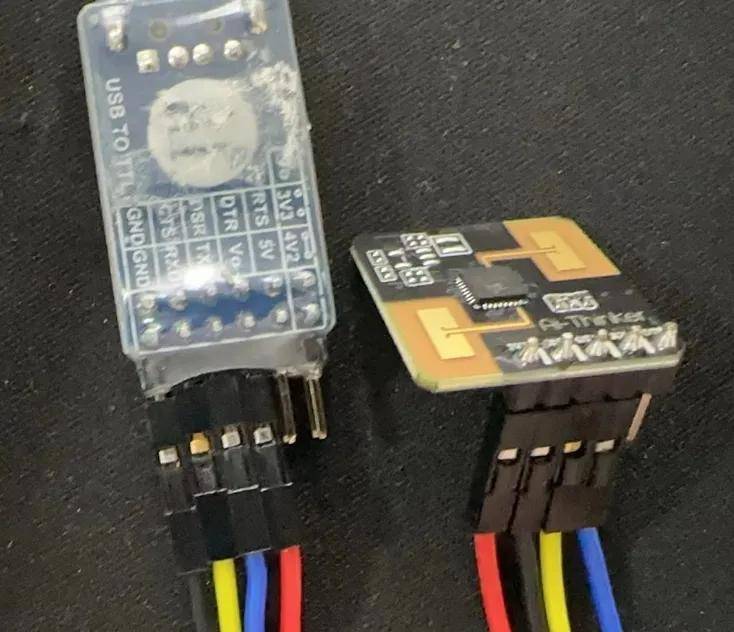
然后带着电脑和 Rd-03,先固定雷达并将天线朝向检测的环境(无人状态)。

打开上位机,部分电脑可能会报错,如果是杀毒软件报错添加白名单即可。点击 Accept。
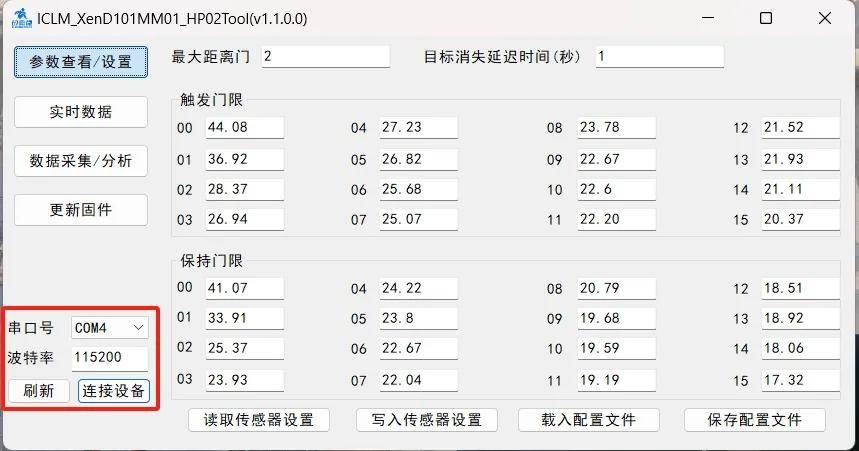
可以看到上位机界面,直接点击左下角的刷新,确定好端口号和波特率(115200),点击连接设备。
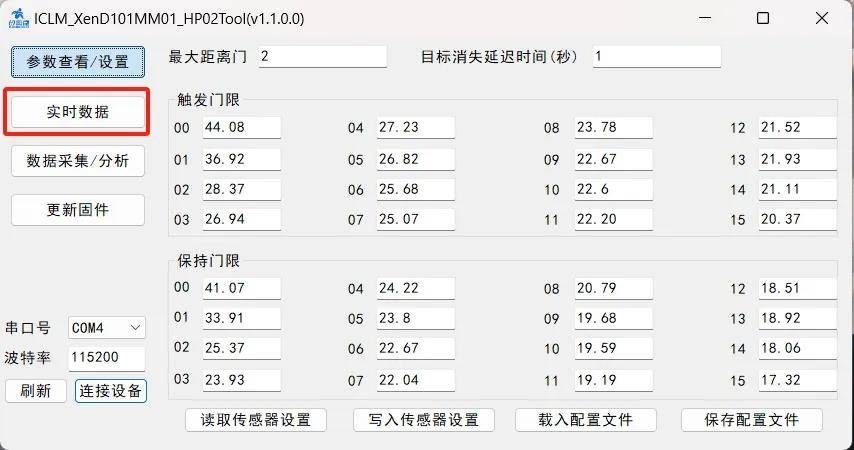
连接成功后,直接点击左侧的“实时数据”。
可以看到这个界面下有三个按钮,“开始”,“生成门限”,“应用门限”。然后确认 Rd-03 固定并且朝向要检测的环境。点击“生成门限”(如果是暗的无法点击,点击“开始”后就可以点了)。

生成门限的过程会有 20 秒的扫描时间,耐心等待一下,生成之后点击确定,之后点击“应用门限”。这样我们的 Rd-03 就已经扫描完检测环境并将数据写入了。



接下来只要回到我们的“参数查看/设置”界面,修改“最大距离门”和“目标消失延迟时间”。

这两个配置选项,故名思意就是修改检测的最大距离和目标触发后持续的状态时间距离门的概念其实就是一个单位,一个距离门是 0.7 米,最大 15 个距离门也就是 10.5 米目标消失延迟时间就是,雷达在范围内触发后会持续处于“激发”状态,这个持续的时间,如果在期间持续被触发的话也会重置这个时间。
大家可以根据需要检测的范围自行设置现在Rd-03 就已经配置完了,最后可以看到 OT2 的引脚,这个是一个高低电平的输入输出 IO 口,当有人时输出高电平,无人时输出低电平注意:上位机和 OT2 不能同时用,当连接上位机的时候 OT2 的电平输出状态会锁定。
返回搜狐,查看更多责任编辑:
亲爱的读者们,感谢您花时间阅读本文。如果您对本文有任何疑问或建议,请随时联系我。我非常乐意与您交流。
发表评论:
◎欢迎参与讨论,请在这里发表您的看法、交流您的观点。